
| Citation: |
Liqin Liu, Xiaoxiao Liu, Chunrui Zhang. REALIZATION OF NEURAL NETWORK FOR GAIT CHARACTERIZATION OF QUADRUPED LOCOMOTION[J]. Journal of Applied Analysis & Computation, 2022, 12(2): 455-463. doi: 10.11948/20210005

|
REALIZATION OF NEURAL NETWORK FOR GAIT CHARACTERIZATION OF QUADRUPED LOCOMOTION
-
Abstract
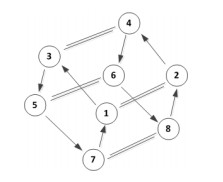
Animal central pattern generator (CPG) is a device used to simulate the nervous system of animals. It is widely used in the design and control of four-legged robots. The objective of this paper is to establish a CPG network which is formed by a set of mutually symmetric neural networks combined with time delay to generate rhythmic motion patterns. Firstly, a symmetric delayed neural network consists of two loops and composed of eight neurons that can produce multi-phase locked oscillation patterns corresponding to the quadruped gaits. Then the primary gaits of all six types can be produced, and gait transitions between the different gaits are generated by altering the delay as the parameter, i.e., different ranges of delay correspond to different patterns of neural neurons. At last£¬ the simulation results show that the delayed neural network can generate multiple periodic oscillations corresponding to the gait of quadruped locomotion.
-
Keywords:
- Hopfield neural network /
- symmetry /
- delay /
- bifurcating periodic solutions /
- gait
-

-
References
[1] M. Bonnin, Waves and patterns in ring lattices with delays, Physica D, 2009, 238(1), 77-87. doi: 10.1016/j.physd.2008.08.015 [2] P. Buono and M. Golubitsky, Models of central pattern generators for quadruped locomotion: I. Primary gaits, Journal of Mathematical Biology, 2001, 42(4), 291-326. doi: 10.1007/s002850000058 [3] B. Cafer, Neural coupled central pattern generator based smooth gait transition of a biomimetic hexapod robot, Neurocomputing, 2021, 420, 210-226. doi: 10.1016/j.neucom.2020.07.114 [4] L. Guerrini, A. Matsumoto and F. Szidarovszky, Neoclassical growth model with multiple distributed delays, Communications in Nonlinear Science and Numerical Simulation, 2019, 70, 234-247. doi: 10.1016/j.cnsns.2018.10.005 [5] S. Guo and J. Man, Patterns in hierarchical networks of neuronal oscillators with $ D_{3}\times Z_{3}$ symmetry, Journal of Differential Equations, 2013, 254(8), 3501-3529. doi: 10.1016/j.jde.2013.01.027 CrossRef $ D_{3}\times Z_{3}$ symmetry" target="_blank">Google Scholar
[6] M. Golubitsky, I. Stewart, P. Buono and J. Collins, Symmetry in locomotor central pattern generators and animal gaits, Nature, 1999, 401(6754), 693-695. doi: 10.1038/44416 [7] M. Golubitsky, I. N. Stewart and D. G. Schaeffer, Singularities and Groups in Bifurcation Theory: Vol. 2., Appl. Math. Sci. 69, Springer-Verlag, New York, 1988. [8] S. Li and S. Guo, Hopf bifurcation for semilinear FDEs in general banach spaces, International Journal of Bifurcation and Chaos, 2020, 30(9), 2050130. doi: 10.1142/S0218127420501308 [9] J. Liu, L. Pan, B. Liu and T. Zhang, Dynamics of a predator-prey model with fear effect and time delay, Complexity, 2021, 9184193. [10] L. Liu and C. Zhang, Dynamic properties of VDP-CPG model in rhythmic movement with delay, Mathematical Biosciences and Engineering, 2020, 17(4), 3190-3202. doi: 10.3934/mbe.2020181 [11] X. Mao, Stability and Hopf bifurcation analysis of a pair of three-neuron loops with time delays, Nonlinear Dynamics, 2012, 68(1-2), 151-159. doi: 10.1007/s11071-011-0211-3 [12] C. Pinto and M. Golubitsky, Central pattern generators for bipedal locomotion, Mathematical Biology, 2006, 53(3), 474-489. doi: 10.1007/s00285-006-0021-2 [13] I. Stewart, Symmetry-Breaking in a rate model for a biped locomotion central pattern generator, Symmetry, 2014, 6(1), 23-66. doi: 10.3390/sym6010023 [14] Y. Song, Y. Han and Y. Peng, Stability and Hopf bifurcation in an unidirectional ring of n neurons with distributed delays, Neurocomputing, 2013, 121, 442-452. doi: 10.1016/j.neucom.2013.05.015 [15] B. Strohmer, P. Manoonpong and L. B. Larsen, Flexible spiking CPGs for online manipulation during hexapod walking, Frontiers in Neurorobotics, 2020, 14, 1-12. doi: 10.3389/fnbot.2020.00001 [16] J. Wu, Symmetric functional differential equations and neural networks with memory, Transactions of the American Mathematical Society, 1998, 350(12), 4799-4838. doi: 10.1090/S0002-9947-98-02083-2 [17] J. Zhao and T. Iwasaki, CPG control for harmonic motion of assistive robot with human motor control identification, IEEE Transactions on Control Systems Technology, 2020, 28(4), 1323-1336. doi: 10.1109/TCST.2019.2910160 [18] C. Zhang, B. Zheng and P. Yu, Second-order normal forms for n-dimensional systems with a nilpotent point, Journal of Applied Analysis and Computation, 2020, 10(5), 2233-2262. doi: 10.11948/20190393 [19] C. Zhang, Y. Zhang and B. Zheng, A model in a coupled system of simple neural oscillators with delays, Journal of Computational and Applied Mathematics, 2009, 229(1), 264-273. doi: 10.1016/j.cam.2008.10.048 -
-
Figures(3) / Tables(5)

Export File
Citation
Liqin Liu, Xiaoxiao Liu, Chunrui Zhang. REALIZATION OF NEURAL NETWORK FOR GAIT CHARACTERIZATION OF QUADRUPED LOCOMOTION[J]. Journal of Applied Analysis & Computation, 2022, 12(2): 455-463. doi: 10.11948/20210005
Format
Content
 DownLoad:
DownLoad:
- Figure 1. Schematic diagram of the system (1.1).
-
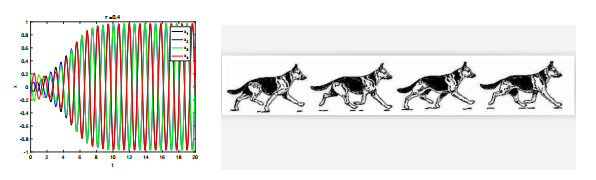
Figure 2.
$ x_{1}(t) = x_{4}(t) $ and$ x_{2}(t) = x_{3}(t) $ ; and they are$ \frac{T}{2} $ out of phase with$ \tau = 0.4 $ and initial condition (0.1, -0.1, 0.2, -0.2, 0.1, -0.1, 0.2, -0.2). -
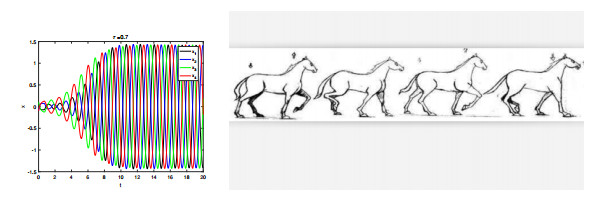
Figure 3.
$ x_{1}(t), x_{4}(t), x_{2}(t) $ and$ x_{3}(t) $ are$ \frac{T}{4} $ out of phase with$ \tau = 0.7 $ and initial condition (0.1, - 0.1, 0.1, -0.1, 0.2, - 0.2, 0.2, -0.2).