
| Citation: |
Ye Cheng, Bao Shi, Bin Wu. ROBUST FIXED-TIME CONSENSUS PROTOCOLS FOR MULTI-AGENT SYSTEMS WITH NONLINEAR STATE MEASUREMENTS[J]. Journal of Applied Analysis & Computation, 2020, 10(6): 2323-2337. doi: 10.11948/20190208

|
ROBUST FIXED-TIME CONSENSUS PROTOCOLS FOR MULTI-AGENT SYSTEMS WITH NONLINEAR STATE MEASUREMENTS
-
Abstract
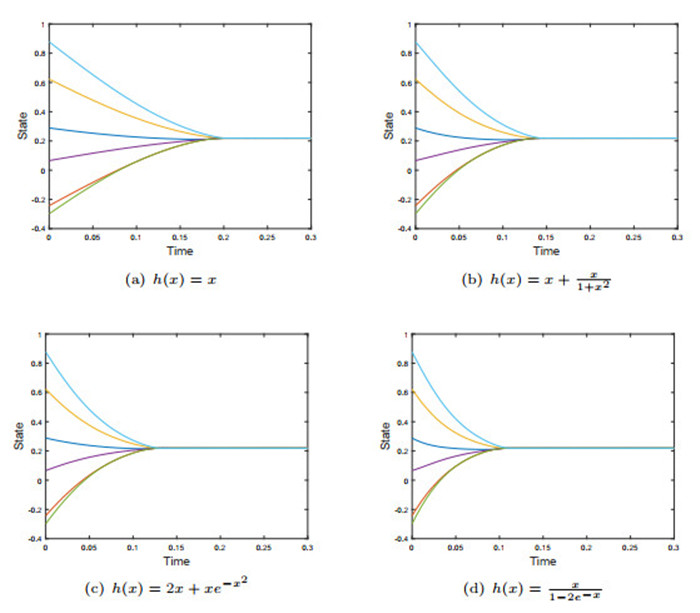
This paper solves the robust fixed-time consensus problem for multi-agent systems with nonlinear state measurements. Sufficient conditions are established for the proposed protocol to reach fixed-time consensus under time-varying undirected and fixed directed topology with the aid of Lyapunov functions. It is proved that the finite settling time of the presented protocol for robust consensus is uniformly bounded for any initial condition, which makes it possible for people to design and estimate the convergence time off-line. Numerical simulations are preformed to show the effectiveness of our proposed protocol.-
Keywords:
- Fixed-time consensus /
- multi-agent systems /
- robustness /
- state measurements
-

-
References
[1] G. Albi, D. Balagué, J. A. Carrillo and J. V. Brecht, Stability analysis of flock and mill rings for second order models in swarming, SIAM J. Appl. Math., 2014, 74(3), 794–818. doi: 10.1137/13091779X [2] D. Bauso and M. Cannon, Consensus in opinion dynamics as a repeated game, Automatica, 2018, 90, 204–211. doi: 10.1016/j.automatica.2017.12.062 [3] S. P. Bhat and D. S. Bernstein, Finite-time stability of continuous autonomous systems, SIAM J. Control Optim., 2000, 38(3), 751–766. doi: 10.1137/S0363012997321358 [4] Y. Cheng, X. Wang and B. Shi, Consensus of a two-agent opinion dynamical system with processing delay, Int. J. Biomath., 2018, 11(6), 1850081. doi: 10.1142/S179352451850081X [5] Y. Cheng, B. Shi, W. Zhao and L. Ding, Further improvement of finite-time consensus protocols for detail-balanced networks, J. Appl. Anal. Comput., 2019, 9(5), 1927–1939. [6] T. Chu, L. Wang, T. Chen and S. Mu, Complex emergent dynamics of anisotropic swarms: Convergence vs oscillation, Chaos Solitons Fractals, 2006, 30(4), 875–885. doi: 10.1016/j.chaos.2005.08.133 [7] J. Cortés, Finite-time convergent gradient flows with applications to network consensus, Automatica, 2006, 42(11), 1993–2000. doi: 10.1016/j.automatica.2006.06.015 [8] F. Cucker and S. Smale, Emergent behavior in flocks, IEEE Trans. Autom. Control, 2007, 52(5), 852–862. doi: 10.1109/TAC.2007.895842 [9] M. Defoort, A. Polyakov, G. Demesure, M. Djemai and K. Veluvolu, Leader-follower fixed-time consensus for multi-agent systems with unknown non-linear inherent dynamics, IET Contr. Theory Appl., 2015, 9(14), 2165–2170. doi: 10.1049/iet-cta.2014.1301 [10] H. Geng, Z. Chen, C. Zhang, Z. Liu and Q. Zhang, Consensus of heterogeneous multi-agent systems with linear and nonlinear dynamics, J. Appl. Anal. Comput., 2016, 6(1), 1–11. [11] E. Girejko and A. B. Malinowska, Leader-following consensus for networks with single-and double-integrator dynamics, Nonlinear Anal.-Hybrid Syst., 2019, 31, 302–316. doi: 10.1016/j.nahs.2018.10.007 [12] C. Hua, X. Sun, X. You and X. Guan, Finite-time consensus control for second-order multi-agent systems without velocity measurements, Int. J. Syst. Sci., 2017, 48(2), 337–346. doi: 10.1080/00207721.2016.1181224 [13] R. A. Horn and C. R. Johnson, Matrix Analysis, Cambridge University Press, Cambridge, 1985. [14] F. Jiang and L. Wang, Finite-time weighted average consensus with respect to a monotonic function and its application, Syst. Control Lett., 2011, 60(9), 718–725. doi: 10.1016/j.sysconle.2011.05.009 [15] Y. Kim and M. Mesbahi, On maximizing the second smallest eigenvalue of a state-dependent graph laplacian, IEEE Trans. Autom. Control, 2006, 51(1), 116–120. doi: 10.1109/TAC.2005.861710 [16] S. Li, H. Du and X. Lin, Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics, Automatica, 2011, 47(8), 1706–1712. doi: 10.1016/j.automatica.2011.02.045 [17] M. G. Medina-Guevara and A. Gallegos, On S1 as an alternative continuous opinion space in a three-party regime, J. Comput. Appl. Math., 2017, 318(C), 230–241. [18] K. Ogiwara, T. Fukami and N. Takahashi, Maximizing algebraic connectivity in the space of graphs with fixed number of vertices and edges, IEEE Trans. Control Netw. Syst., 2017, 4(2), 359–368. doi: 10.1109/TCNS.2015.2503561 [19] R. Olfati-Saber and R. M. Murray, Consensus problems in networks of agents with switching topology and time-delays, IEEE Trans. Autom. Control, 2004, 49(9), 1520–1533. doi: 10.1109/TAC.2004.834113 [20] C. Pignotti and I. Reche Vallejo, Flocking estimates for the Cucker–Smale model with time lag and hierarchical leadership, J. Math. Anal. Appl., 2018, 464(2), 1313–1332. [21] A. Polyakov, D. Efimov and W. Perruquetti, Finite-time and fixed-time stabilization: Implicit Lyapunov function approach, Automatica, 2015, 51, 332–340. doi: 10.1016/j.automatica.2014.10.082 [22] H. M. Rodrigues, J. Wu and M. Gameiro, Switching synchronized chaotic systems applied to secure communication, J. Appl. Anal. Comput., 2018, 8(2), 413–426. [23] V. D. Silva and R. Ghrist, Converage in sensor networks via persistent homology, Algebr. Geom. Topol., 2007, 7(1), 339–358. doi: 10.2140/agt.2007.7.339 [24] T. Vicsek, A. Czirók, E. Ben-Jacob, I. Cohen and O. Shochet, Novel type of phase transition in a system of self-driven particles, Phys. Rev. Lett., 1995, 75(6), 1226–1229. doi: 10.1103/PhysRevLett.75.1226 [25] W. Yu, W. Ren, W. X. Zheng, G. Chen and J. Lü, Distributed control gains design for consensus in multi-agent systems, Automatica, 2013, 49(7), 2107–2115. doi: 10.1016/j.automatica.2013.03.005 [26] B. Zhu, L. Xie, D. Han, X. Meng and R. Teo, A survey on recent progress in control of swarm systems, Sci. China-Inf. Sci., 2017, 60(7), 070201. doi: 10.1007/s11432-016-9088-2 [27] Z. Zuo and L. Tie, A new class of finite-time nonlinear consensus protocols for multi-agent systems, Int. J. Control, 2014, 87(2), 363–370. doi: 10.1080/00207179.2013.834484 [28] Z. Zuo, Nonsingular fixed-time consensus tracking for second-order multi-agent networks, Automatica, 2015, 54, 305–309. doi: 10.1016/j.automatica.2015.01.021 [29] Z. Zuo, B. Tian, M. Defoort and Z. Ding, Fixed-time consensus tracking for multi-agent systems with high-order integrator dynamics, IEEE Trans. Autom. Control, 2017, 63(2), 563–570. -
-
Figures(2)

Export File
Citation
Ye Cheng, Bao Shi, Bin Wu. ROBUST FIXED-TIME CONSENSUS PROTOCOLS FOR MULTI-AGENT SYSTEMS WITH NONLINEAR STATE MEASUREMENTS[J]. Journal of Applied Analysis & Computation, 2020, 10(6): 2323-2337. doi: 10.11948/20190208
Format
Content
 DownLoad:
DownLoad:
- Figure 1. Consensus of (1.1) with different state measurements under time-varying undirected topology.
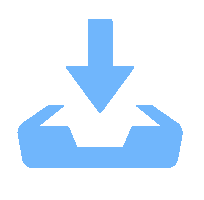
- Figure 2. Consensus of (1.1) with different state measurements under fixed directed topology.