
| Citation: |
Xia Zhou, Meixuan Xi, Wanbing Liu, Zhongjun Ma, Jinde Cao. DELAYED CONSENSUS IN MEAN-SQUARE OF MASS UNDER MARKOV SWITCHING TOPOLOGIES AND BROWN NOISE[J]. Journal of Applied Analysis & Computation, 2024, 14(1): 543-559. doi: 10.11948/20230307

|
DELAYED CONSENSUS IN MEAN-SQUARE OF MASS UNDER MARKOV SWITCHING TOPOLOGIES AND BROWN NOISE
-
Abstract
The delayed consensus in mean-square issue of nonlinear multi-agent systems (NMASs) under uncertain nonhomogeneous Markov switching (UNMS) topologies and Brown noise is investigated in this paper. Firstly, there are two delays $ d(t) $ and $ \tau $. $ d(t) $ represents the time-varying delay among followers. $ \tau $ stands for the delay between the leader and the followers, which is the delay in delayed consensus in mean-square. When $ \tau=0 $, the delayed consensus degenerates to identical consensus. Secondly, the random communication topologies are modeled as nonhomogeneous Markov switching topologies in which the transition rates (TRs) are partially or totally unknown. Further, communication noise is also considered, which is assumed to be Brown noise. Sufficient conditions of delayed consensus in mean-square for the systems are gained on account of qualitative and stability theory, theory of random differetntial equations and distributed control theory. Finally, the correctness of the results is verified through the example given.
-

-
References
[1] M. H. DeGroot, Reaching a consensus, J. Am. Stat. Assoc., 1974, 69(345), 118–121. doi: 10.1080/01621459.1974.10480137 [2] L. Ding and G. Guo, Sampled-data leader-following consensus for nonlinear multi-agent systems with markovian switching topologies and communication delay, J. Franklin Inst., 2015, 352(1), 369–383. doi: 10.1016/j.jfranklin.2014.10.025 [3] F. Giulietti, L. Pollini and M. Innocenti, Autonomous formation flight, IEEE Contr. Syst. Mag., 2000, 20(6), 34–44. doi: 10.1109/37.887447 [4] S. Guo, L. Mo and Y. Yu, Mean-square consensus of heterogeneous multi-agent systems with communication noises, J. Franklin Inst., 2018, 355(8), 3717–3736. doi: 10.1016/j.jfranklin.2018.03.002 [5] Y. Hong, J. Hu and L. Gao, Tracking control for multi-agent consensus with an active leader and variable topology, Automatica, 2006, 42(7), 1177–1182. doi: 10.1016/j.automatica.2006.02.013 [6] W. Huang, B. Tian, T. Liu, et al., Event-triggered leader-following consensus of multi-agent systems under semi-Markov switching topology with partially unknown rates, J. Franklin Inst., 2022, 359(7), 3103–3125. doi: 10.1016/j.jfranklin.2022.02.024 [7] B. Jiang, Q. Shen and P. Shi, Neural-networked adaptive tracking control for switched nonlinear pure-feedback systems under arbitrary switching, Automatica, 2015, 61, 119–125. doi: 10.1016/j.automatica.2015.08.001 [8] D. Lee and M. W. Spong, Stable flocking of multiple inertial agents on balanced graphs, IEEE Trans. Autom. Control, 2007, 52(8), 1469–1475. doi: 10.1109/TAC.2007.902752 [9] F. Li, Z. Ma and Q. Duan, Clustering component synchronization in a class of unconnected networks via pinning control, Physica A, 2019, 525, 394–401. doi: 10.1016/j.physa.2019.03.080 [10] F. Li, Z. Ma and Q. Duan, Partial component synchronization on chaotic networks, Physica A, 2019, 515, 707–714. doi: 10.1016/j.physa.2018.10.008 [11] M. Li and F. Deng, Necessary and sufficient conditions for consensus of continuous-time multiagent systems with markovian switching topologies and communication noises, J. Franklin Inst., 2019, 50(7), 3264–3270. [12] H. Luo, Y. Wang, R. Zhan, et al., Cluster-delay mean square consensus of stochastic multi-agent systems with impulse time windows, Entropy, 2021, 23(8), 1033. doi: 10.3390/e23081033 [13] Y. Ma, Q. Huang and J. Zhang, Lag consensus of second-order discrete-time leader-following multi-agent systems with communication delays, in 2020 Chinese Automation Congress (CAC), 2020, 6673–6678. DOI: 10.1109/CAC51589.2020.9326649 .[14] Y. Ma, S. Li, Q. Huang and J. Zhang, Lag consensus of discrete-time nonlinear leader-following multi-agent systems, in 2020 Chinese Automation Congress (CAC), 2020, 6690–6695. DOI: 10.1109/CAC51589.2020.9327512 .[15] Z. Ma, Y. Wang and X. Li, Cluster-delay consensus in first-order multi-agent systems with nonlinear dynamics, Nonlinear Dynam., 2016, 83, 1303–1310. doi: 10.1007/s11071-015-2403-8 [16] R. Olfati-Saber, J. A. Fax and R. M. Murray, Consensus and cooperation in networked multi-agent systems, Proc. IEEE, 2007, 95(1), 215–233. doi: 10.1109/JPROC.2006.887293 [17] A. Rahmani, M. Ji, M. Mesbahi and M. Egerstedt, Controllability of multi-agent systems from a graph-theoretic perspective, SIAM J. Control Optim., 2009, 48(1), 162–186. doi: 10.1137/060674909 [18] W. Ren and R. W. Beard, Consensus seeking in multiagent systems under dynamically changing interaction topologies, IEEE Trans. Autom. Contr., 2005, 50(5), 655–661. doi: 10.1109/TAC.2005.846556 [19] W. Sun, S. Wang, G. Wang and Y. Wu, Lag synchronization via pinning control between two coupled networks, Nonlinear Dynam., 2015, 79(4), 2659–2666. doi: 10.1007/s11071-014-1838-7 [20] Y. G. Sun and L. Wang, Consensus of multi-agent systems in directed networks with nonuniform time-varying delays, IEEE Trans. Automatic Contr., 2009, 54(7), 1607–1613. doi: 10.1109/TAC.2009.2017963 [21] X. Wang, J. H. Park and H. Yang, An improved protocol to consensus of delayed mass with unms and aperiodic dos cyber-attacks, IEEE Trans. Netw. Sci. Eng., 2021, 8(3), 2506–2516. doi: 10.1109/TNSE.2021.3098258 [22] X. Wang, H. Yang and S. Zhong, Improved results on consensus of nonlinear mass with nonhomogeneous Markov switching topologies and dos cyber attacks, J. Franklin Inst., 2021, 358(14), 7237–7253. doi: 10.1016/j.jfranklin.2021.07.044 [23] Y. Wang, Z. Cheng and M. Xiao, Uavs' formation keeping control based on multi–agent system consensus, IEEE Access, 2020, 8, 49000–49012. doi: 10.1109/ACCESS.2020.2979996 [24] Y. Wang and Z. Ma, Lag consensus of the second-order leader-following multi-agent systems with nonlinear dynamics, Neurocomputing, 2016, 171, 82–88. doi: 10.1016/j.neucom.2015.06.020 [25] Y. Wang, Z. Ma and G. Chen, Avoiding congestion in cluster consensus of the second-order nonlinear multiagent systems, IEEE Trans. Neural Netw. Learn. Syst., 2017, 29(8), 3490–3498. [26] Y. Wang, Z. Ma, S. Zheng and G. Chen, Pinning control of lag-consensus for second-order nonlinear multiagent systems, IEEE Trans. Cybern., 2016, 47(8), 2203–2211. [27] Y. Wang, Y. Wei, X. Liu, et al., Optimal persistent monitoring using second-order agents with physical constraints, IEEE Trans. Autom. Control, 2018, 64(8), 3239–3252. [28] B. Wu, Z. Ma and Y. Wang, Partial component consensus of leader-following multi-agent systems, Acta Phys. Sin., 2017, 66(6), 5–11. [29] Y. Xie, Y. Wang and Z. Ma, Lag consensus of leader-following multi-agent systems (in chinese), Acta Phys. Sin., 2014, 63(4), 040202. doi: 10.7498/aps.63.040202 [30] Z. Zhang, Z. Ma and Y. Wang, Partial component consensus of leader-following multi-agent systems via intermittent pinning control, Physica A, 2019, 536, 1–15. [31] X. Zhou, L. Chen, J. Cao and J. Cheng, Asynchronous filtering of msrsnss with the event-triggered try-once-discard protocol and deception attacks, ISA trans., 2022, 131, 210–221. doi: 10.1016/j.isatra.2022.04.030 [32] X. Zhou, L. Chen, J. Cheng and K. Shi, Partially mode-dependent asynchronous filtering of ts fuzzy msrsnss with parameter uncertainty, Int. J. Control Autom. Syst., 2022, 20(1), 298–309. doi: 10.1007/s12555-020-0892-9 [33] X. Zhou, J. Cheng, J. Cao and J. H. Park, Event-based asynchronous dissipative filtering for fuzzy nonhomogeneous Markov switching systems with variable packet dropouts, Fuzzy Set. Syst., 2022, 432, 50–67. doi: 10.1016/j.fss.2021.04.005 [34] X. Zhou, J. Cheng, J. Cao and M. Ragulskis, Asynchronous dissipative filtering for nonhomogeneous Markov switching neural networks with variable packet dropouts, Neural Networks, 2020, 130, 229–237. doi: 10.1016/j.neunet.2020.07.012 [35] X. Zhou, C. Huang, J. Cao, et al., Consensus of nmass with msts subjected to dos attacks under event-triggered control, Filomat, 2023, 37(17), 5567–5580. [36] X. Zhou, C. Huang, P. Li, et al., Leader-following identical consensus for markov jump nonlinear multi-agent systems subjected to attacks with impulse, Nonlinear Anal-Model., 2023, 28, 1–25. [37] X. Zhou, X. Liu and S. Zhong, Stability of delayed impulsive stochastic differential equations driven by a fractional brown motion with time-varying delay, Adv. Differ. Equ., 2016, 2016(1), 2506–2516. [38] X. Zhou, X. Liu and S. Zhong, Stochastic Volterra integro-differential equations driven by a fractional brownian motion with delayed impulses, Filomat, 2017, 31(19), 5965–5978. doi: 10.2298/FIL1719965Z [39] X. Zhou, D. Zhou and S. Zhong, Existence and exponential stability in the p th moment for impulsive neutral stochastic integro-differential equations driven by mixed fractional brownian motion, J. Inequal. Appl., 2019, 2019(1), 1–19. doi: 10.1186/s13660-019-1955-4 -
-
Figures(5)

Export File
Citation
Xia Zhou, Meixuan Xi, Wanbing Liu, Zhongjun Ma, Jinde Cao. DELAYED CONSENSUS IN MEAN-SQUARE OF MASS UNDER MARKOV SWITCHING TOPOLOGIES AND BROWN NOISE[J]. Journal of Applied Analysis & Computation, 2024, 14(1): 543-559. doi: 10.11948/20230307
Format
Content
 DownLoad:
DownLoad:
-
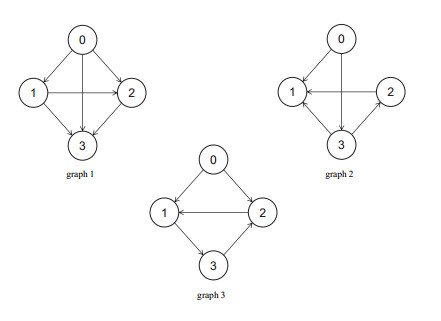
Figure 1.
Communication topological diagrams.
-
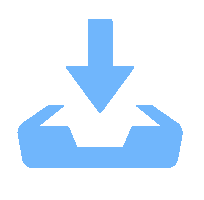
Figure 2.
Adaptive control law for different initial values.
-
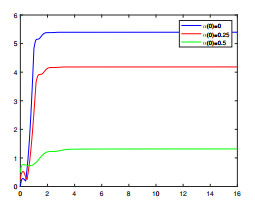
Figure 3.
Jump modes of Markov chain.
-
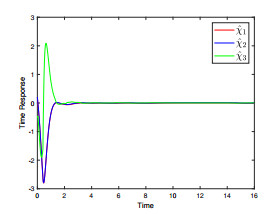
Figure 4.
The position delayed error
$ \hat{\chi}_{i}(t) $ $ i=1, 2, 3 $ -
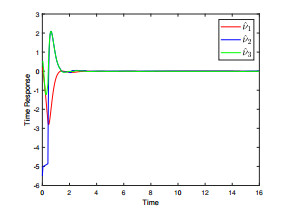
Figure 5.
The velocity delayed error
$ \hat{\nu}_{i}(t) $ $ i=1, 2, 3 $