
| Citation: |
Ye Cheng, Bao Shi, Wenfei Zhao, Liangliang Ding. FURTHER IMPROVEMENT OF FINITE-TIME CONSENSUS PROTOCOLS FOR DETAIL-BALANCED NETWORKS[J]. Journal of Applied Analysis & Computation, 2019, 9(5): 1927-1939. doi: 10.11948/20190008

|
FURTHER IMPROVEMENT OF FINITE-TIME CONSENSUS PROTOCOLS FOR DETAIL-BALANCED NETWORKS
-
Abstract
This paper presents a new class of protocols to solve finite-time consensus for multi-agent systems. The protocols are induced from the classical finite-time consensus algorithm by using the so-called protocol function. Sufficient conditions are established for networked agents to experience finite-time consensus under time-varying undirected and fixed directed topologies. Numerical simulations show that the proposed protocols can provide more flexibility to improve convergence rate.-
Keywords:
- Finite-time consensus /
- multi-agent systems /
- convergence rate /
- graph theory
-

-
References
[1] G. Albi, D. Balagué, J. A. Carrillo and J. V. Brecht, Stability analysis of flock and mill rings for second order models in swarming, SIAM J. Appl. Math., 2014, 74(3), 794–818. [2] F. M. Atay, The consensus problem in networks with transmission delays, Philos. Trans. R. Soc. A-Math. Phys. Eng. Sci., 2013, 371(1999), 20120460. doi: 10.1098/rsta.2012.0460 [3] D. Bauso and M. Cannon, Consensus in opinion dynamics as a repeated game, Automatica, 2018, 90, 204–211. doi: 10.1016/j.automatica.2017.12.062 [4] S. P. Bhat and D. S. Bernstein, Finite-time stability of continuous autonomous systems, SIAM J. Control Optim., 2000, 38(3), 751–766. [5] Y. Cheng, X. Wang and B. Shi, Consensus of a two-agent opinion dynamical system with processing delay, Int. J. Biomath., 2018, 11(6), 1850081. doi: 10.1142/S179352451850081X [6] L. Cheng, Z. G. Hou and M. Tan, A mean square consensus protocol for linear multi-agent systems with communication noises and fixed topologies, IEEE Trans. Autom. Control, 2014, 59(1), 261–267. doi: 10.1109/TAC.2013.2270873 [7] T. Chu, L. Wang, T. Chen and S. Mu, Complex emergent dynamics of anisotropic swarms: Convergence vs oscillation, Chaos Solitons Fractals, 2006, 30(4), 875–885. [8] J. Cortés, Finite-time convergent gradient flows with applications to network consensus, Automatica, 2006, 42(11), 1993–2000. doi: 10.1016/j.automatica.2006.06.015 [9] F. Cucker and S. Smale, Emergent behavior in flocks, IEEE Trans. Autom. Control, 2007, 52(5), 852–862. doi: 10.1109/TAC.2007.895842 [10] H. Geng, Z. Chen, C. Zhang, Z. Liu and Q. Zhang, Consensus of heterogeneous multi-agent systems with linear and nonlinear dynamics, J. Appl. Anal. Comput., 2016, 6(1), 1–11. [11] E. Girejko and A. B. Malinowska, Leader-following consensus for networks with single-and double-integrator dynamics, Nonlinear Anal.-Hybrid Syst., 2019, 31, 302–316. doi: 10.1016/j.nahs.2018.10.007 [12] C. Hua, X. Sun, X. You and X. Guan, Finite-time consensus control for second-order multi-agent systems without velocity measurements, Int. J. Syst. Sci., 2017, 48(2), 337–346. doi: 10.1080/00207721.2016.1181224 [13] G. H. Hardy, J. E. Littlewood and G. Pólya, Inequalities, Cambridge University Press, Cambridge, 1934. [14] R. A. Horn and C. R. Johnson, Matrix Analysis, Cambridge University Press, Cambridge, 1985. [15] Y. Kim and M. Mesbahi, On maximizing the second smallest eigenvalue of a state-dependent graph laplacian, IEEE Trans. Autom. Control, 2006, 51(1), 116–120. doi: 10.1109/TAC.2005.861710 [16] M. G. Medina-Guevara and A. Gallegos, On $S^{1}$ as an alternative continuous opinion space in a three-party regime, J. Comput. Appl. Math., 2017, 318(C), 230–241. [17] J. Ni, L. Liu, C. Liu, X. Hu and S. Li, Further improvement of fixed-time protocol for average consensus of multi-agent systems, IFAC-PapersOnLine, 2017, 50(1), 2523–2529. doi: 10.1016/j.ifacol.2017.08.064 [18] K. Ogiwara, T. Fukami and N. Takahashi, Maximizing algebraic connectivity in the space of graphs with fixed number of vertices and edges, IEEE Trans. Control Netw. Syst., 2017, 4(2), 359–368. doi: 10.1109/TCNS.2015.2503561 [19] R. Olfati-Saber and R. M. Murray, Consensus problems in networks of agents with switching topology and time-delays, IEEE Trans. Autom. Control, 2004, 49(9), 1520–1533. doi: 10.1109/TAC.2004.834113 [20] C. Pignotti and I. Reche Vallejo, Flocking estimates for the Cucker–Smale model with time lag and hierarchical leadership, J. Math. Anal. Appl., 2018, 464(2), 1313–1332. [21] V. D. Silva and R. Ghrist, Converage in sensor networks via persistent homology, Algebr. Geom. Topol., 2007, 7(1), 339–358. doi: 10.2140/agt.2007.7.339 [22] T. Vicsek, A. Czirók, E. Ben-Jacob, I. Cohen and O. Shochet, Novel type of phase transition in a system of self-driven particles, Phys. Rev. Lett., 1995, 75(6), 1226–1229. doi: 10.1103/PhysRevLett.75.1226 [23] F. Xiao and L. Wang, State consensus for multi-agent systems with switching topologies and time-varying delays, Int. J. Control, 2006, 79(10), 1227–1284. [24] W. Yu, W. Ren, W. X. Zheng, G. Chen and J. Lü, Distributed control gains design for consensus in multi-agent systems, Automatica, 2013, 49(7), 2107–2115. doi: 10.1016/j.automatica.2013.03.005 [25] B. Zhu, L. Xie, D. Han, X. Meng and R. Teo, A survey on recent progress in control of swarm systems, Sci. China-Inf. Sci., 2017, 60(7), 070201. doi: 10.1007/s11432-016-9088-2 [26] X. Zhang, L. Liu and G. Feng, Leader-follower consensus of time-varying nonlinear multi-agent systems, Automatica, 2015, 52, 8–14. doi: 10.1016/j.automatica.2014.10.127 [27] Z. Zuo and L. Tie, A new class of finite-time nonlinear consensus protocols for multi-agent systems, Int. J. Control, 2014, 87(2), 363–370. doi: 10.1080/00207179.2013.834484 -
-
Figures(2)

Export File
Citation
Ye Cheng, Bao Shi, Wenfei Zhao, Liangliang Ding. FURTHER IMPROVEMENT OF FINITE-TIME CONSENSUS PROTOCOLS FOR DETAIL-BALANCED NETWORKS[J]. Journal of Applied Analysis & Computation, 2019, 9(5): 1927-1939. doi: 10.11948/20190008
Format
Content
 DownLoad:
DownLoad:
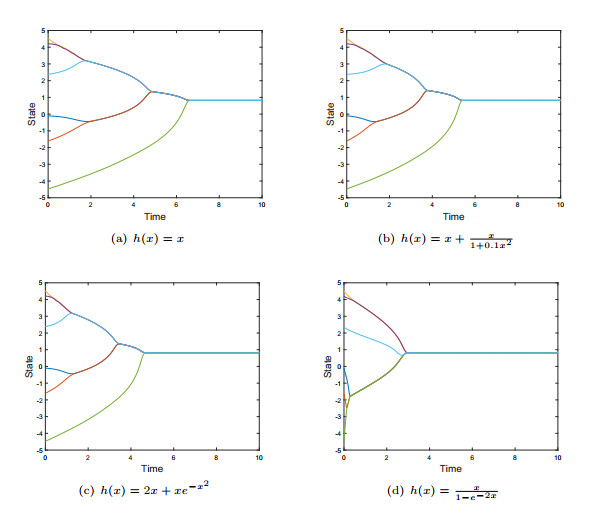
- Figure 1. Consensus of (1.1) with different protocol functions under time-varying undirected topology
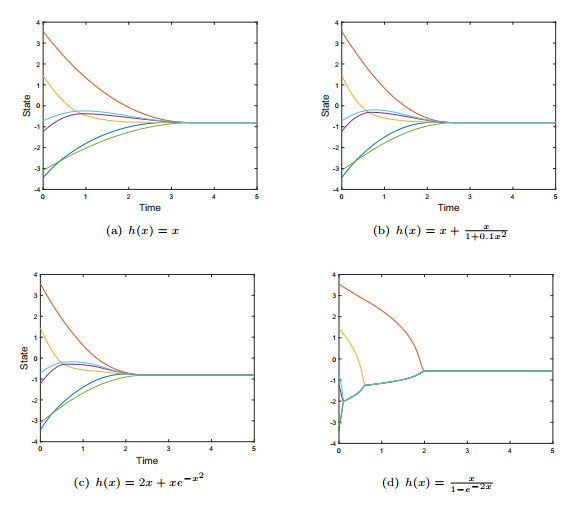
- Figure 2. Consensus of (1.1) with different protocol functions under fixed directed topology